设计适合机器人的环境
人类与机器人在城市、建筑、人行道和公园等人造环境中的互动日益频繁。机器人具有适应性强、成本效益高和可扩展性,正逐渐融入日常生活的各个方面,从制造业到医疗保健业再到酒店业。
新加坡科技设计大学 (SUTD) 副教授 Mohan Rajesh Elara 表示:“确保机器人能够在建筑环境中导航和有效操作对于其广泛采用和接受至关重要。”
然而,让完全自主的服务机器人在人类环境中运行仍然是一个遥远的目标。建筑环境中的空间限制限制了机器人的性能。在设计包含机器人的环境时,必须检查建筑环境中的机器人交互。目前用于此目的的方法涉及实际测试和物理实验,这些方法成本高昂、耗时且劳动密集。
为了解决这些限制,莫汉副教授和他的 SUTD 团队在他们的论文《增强机器人在建筑环境中的包容性:数字孪生辅助评估设计指南合规性》中探索了一种创新方法。在这里,他们展示了一种利用数字孪生来确定建筑环境设计指南对机器人的实用性的新方法。他们还将一些机器人原型和环境建模为数字孪生,以检查机器人在环境中的行为。
该作品发表在《建筑》杂志上。
数字孪生是物理对象在其虚拟环境中的虚拟复制品。“数字孪生方法具有几个关键优势,包括能够模拟真实场景、实现机器人交互的虚拟测试,并在物理实施之前提供有关是否符合设计指南的见解,”Mohan 副教授说。此外,使用数字孪生可以在部署之前进行实时监控、危险识别和机器人算法训练。
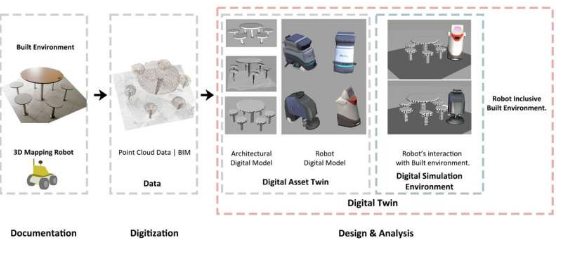
在这项研究中,莫汉副教授使用数字孪生来分析建筑环境对机器人的友好程度,并为机器人部署做好准备。所用方法分为三个阶段:文档记录、数字化和设计分析。
首先,模拟需要现场记录环境。可以通过直接数据收集、激光扫描或摄影测量技术进行。直接数据收集最好在建筑设计过程中进行,使用建筑信息模型 (BIM)——一种生成和管理建筑数字表示的过程。当建筑物已经建成时,可以使用激光扫描或摄影测量技术生成点云数据以供处理。
第二步,数字化重点是使建筑环境的数字模型适合机器人模拟软件。在此步骤中,点云数据将被重建到数字空间中,并用于生成建筑环境的三维 (3D) 模型。
最后,设计并分析数字模型。利用机器人仿真软件中的数字化环境模型,在环境中测试各种机器人的行为和交互。根据现有的建筑环境设计指南制作虚拟场景,并评估机器人的导航、路径规划和与周围环境的交互。
在一个案例研究中,副教授 Mohan 使用数字孪生在六种不同的环境中测试了四种不同的清洁机器人,这些环境均遵循无障碍设计指南。在这四个机器人中,有一个在模拟环境中完成了最多的目标,表现最佳。值得注意的是,机器人的包容性并不总是意味着机器人的性能效率。然而,包容性的环境确实能提高机器人的无障碍性,使它们能够正确完成任务。
随着机器人越来越多地应用于清洁、物流和建筑维护等城市应用,这项研究的发现将有助于改进建筑环境的设计指南,以适应机器人。更好的设计指南将使机器人无缝融入以人为中心的空间,并提高其在各种应用中的效率。
“这些发现可能会通过强调灵活性、适应性和可访问性来塑造未来的空间设计,以适应机器人的交互,”Mohan 副教授补充道。
未来,研究团队的目标是扩展当前的方法,通过使用设计、人工智能和技术,自主生成提高移动机器人可达性所需的基础设施改造。Mohan 副教授还希望制定一套用于构建机器人友好型基础设施的设计指南和建议。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
在众多紧凑型性能车中,大众高尔夫GTI始终以其独特的驾驶乐趣和经典形象占据着重要地位。对于预算有限但又追求...浏览全文>>
-
2022款的大众蔚揽以其优雅的设计和出色的性能在市场上占据了一席之地。对于预算在20-30万元之间的消费者来说,...浏览全文>>
-
池州长安启源E07作为一款备受关注的新能源SUV,在市场上拥有较高的关注度。这款车型凭借其时尚的设计和丰富的...浏览全文>>
-
近年来,随着汽车市场的竞争愈发激烈,各大品牌纷纷推出优惠政策以吸引消费者。作为国内知名汽车品牌之一,蚌...浏览全文>>
-
菱势汽车的菱势电卡是一款新能源物流车,如果您想预约试驾这款车型,以下是可能的流程及注意事项:预约试驾流...浏览全文>>
-
奥迪e-tron GT是一款融合了豪华与科技的电动跑车,如果您对这款车型感兴趣并希望进行试驾体验,可以通过以下...浏览全文>>
-
试驾五菱扬光是一次非常有趣的体验。以下是从咨询到试驾的完整体验过程:咨询阶段1 信息获取:首先通过官方...浏览全文>>
-
在试驾丰田bZ3C时,享受4S店专业服务的关键在于提前做好准备,并充分利用4S店提供的各项资源。以下是一些具体...浏览全文>>
-
近年来,新能源汽车市场蓬勃发展,各大品牌纷纷推出全新车型以满足消费者需求。作为大众汽车旗下备受关注的新...浏览全文>>
-
作为一款备受关注的新能源车型,2022款亳州迈腾GTE在市场上的表现一直引人注目。近期,其最低落地价已降至18 ...浏览全文>>
- 蚌埠揽巡最新价格2024款走势,市场优惠力度持续加大
- 亳州迈腾GTE多少钱 2022款落地价走势,近一个月最低售价18.79万起,性价比凸显
- 安庆探影多少钱?价格解读
- 天津滨海高尔夫GTI最新价格2025款,各车型售价大公开,性价比爆棚
- 试驾奕泽IZOA,感受豪华与科技的完美融合
- 五菱E5试驾预约操作指南
- ARCFOX极狐极狐 阿尔法S6试驾有哪些途径
- 奔腾T55预约试驾有哪些途径
- 东风风度帕拉丁试驾,开启完美驾驭之旅
- 试驾腾势N7,一键搞定,开启豪华驾驶之旅
- 开沃D10多少钱?经销商报价及市场优惠情况
- 飞度新款价格2025款多少钱?如何挑选性价比高的车
- 东莞途锐 2025新款价格全解买车必看
- 试驾东风小康EC36 II的流程及注意事项
- 北京BJ30预约试驾预约流程
- 奥迪A6(进口)试驾预约,从咨询到试驾的完整体验
- 东风本田M-NV试驾全攻略
- 欧拉芭蕾猫落地价全解,买车必看的省钱秘籍
- 龙耀8L新车报价2022款,各配置车型售价全解析
- 沃尔沃S60新能源多少钱 2024款落地价实惠,配置丰富,不容错过