华盛顿州立大学研究人员开发的机器人夹持器能够轻轻地从树上摘下大多数苹果,而不会损坏果实。
这款创新的夹爪是机器人装置的一部分,研究人员希望有一天它能为华盛顿农民完成水果采摘和其他农活,以帮助缓解持续的劳动力短缺问题。研究人员最近在IEEE 第七届软机器人国际会议论文集上发表了他们关于夹爪的研究成果。
“我们希望这个项目能帮助很多人,”华盛顿州立大学机械与材料工程学院的博士生、论文第一作者克里斯·尼纳坦塔 (Chris Ninatanta) 说道。“华盛顿的劳动力短缺对果园来说非常不利。”
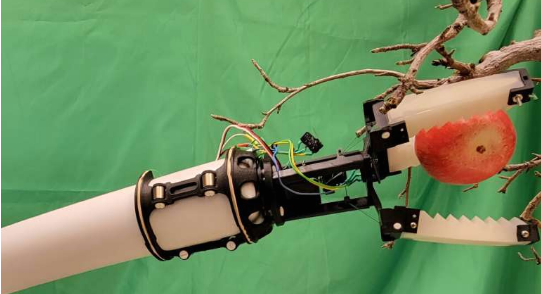
该夹钳重约三分之二磅,使用三根电缆来移动 3D 打印的硬塑料和硅橡胶头手指。手指必须足够柔和,不会损坏苹果,但又要足够有力,才能将苹果从树上拔下来。该夹钳的生产成本约为 30 美元,包括一个用于抓取和松开苹果的开关。它能够成功抓取果园中超过 87.5% 的苹果,而不会损坏它们。
机械与材料工程学院弗莱厄蒂助理教授 Ming Luo 表示:“我们一直致力于通过新设计提高这一水平。”Luo 和生物系统工程学教授兼华盛顿州立大学精准与自动化农业系统中心主任 Manoj Kakee 领导了这项工作。
华盛顿州的苹果产量居全美首位,2022 年,该行业为美国国内生产总值贡献了超过 20 亿美元。在整个华盛顿州,农场每年雇用十几到数百名工人进行果园作业,包括授粉、修剪、疏花和采摘果实。然而,随着人口老龄化和流动农场工人的减少,农民在收获季节很难满足对工人的需求。
近年来,研究人员已经开始开发机器人苹果采摘系统,但已开发的系统在果园中使用成本高昂且复杂。
尼纳坦塔在华盛顿州雅基马长大,童年时曾与父母一起摘水果。当他开始与罗合作开发苹果夹钳机器人时,他让父母录下他们的工作过程,这样他就可以模仿父母的手工来制作夹钳。
“所以这其中的一些设计实际上是受到我父母的启发,”他说。
华盛顿州立大学团队接下来将把他们的轻型夹持器连接到他们正在开发的低成本机器人系统上。与汽车经销商户外广告中经常使用的充气管人类似,机器人手臂由充满空气的柔软织物制成,与汽车经销商的版本类似,但更硬。
作为该项目的一部分,研究人员还在努力为系统添加一个机载摄像头,以便精确引导手臂,以及一个可以扭转的夹钳,类似于人手的旋转,以减少对苹果茎的损伤。他们希望在今年晚些时候在实验室和农田中试用该系统。




