能够与人类一起玩游戏的人工智能 (AI) 系统已变得越来越先进,全球无数电子游戏开发商已经部署了该系统。然而,这些系统大多是为在线、数字平台和虚拟环境中与人类竞争而设计的,而不是在现实世界中与人类竞争。
代尔夫特理工大学 (TU Delft) 的研究人员最近推出了一款新型开源机器人系统,该系统可以在现实环境中与人类用户下棋。这款机器人在arXiv上预先发表的一篇论文中进行了概述,可以证明是人机交互研究的宝贵资源。
Renchi Zhang、Joost de Winter 及其同事在论文中写道:“人工智能领域的最新进展加速了多功能机器人设计的演变。国际象棋提供了一个标准化的环境,可以评估机器人行为对人类行为的影响。本文介绍了一种用于人机交互 (HRI) 研究的开源国际象棋机器人,特别关注口头和非口头交互。”
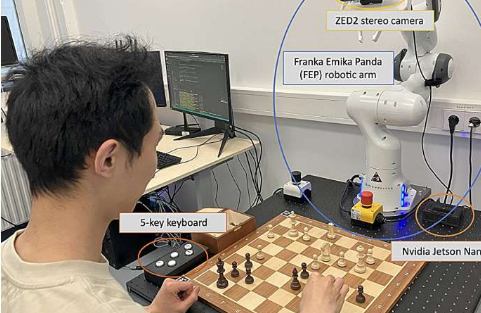
研究人员开发的机器人平台包括硬件和软件组件。机器人的硬件包括一个具有 7 个自由度的 Franka Emika Panda 机械臂、一个 Franka 机械手、一个定制的 3D 打印机械手、一个 ZED2 StereoLabs 摄像头、一个键盘、一个连接到计算机的外部麦克风和扬声器、一台 NVIDIA Jetson Nano 计算机和一台 PC。
该机器人还具有几个底层软件组件,包括感知、分析和评估、运动规划和执行以及交互模块。感知模块分析 ZED2 摄像头捕捉到的棋盘图像并将其转换为文本描述。
随后,分析和评估模块将文本描述输入到棋类引擎,以得出预测动作及其对应的分数。然后,运动规划和执行模块使用预测动作来规划和执行机器人的棋类动作。
最后,交互模块允许机器人与正在竞争的人类玩家进行交流。为了生成对用户问题的回答,该模块依赖于 OpenAI 对话平台 ChatGPT 的 API。
研究人员在论文中写道:“OpenChessRobot 使用计算机视觉识别棋子、执行移动,并使用语音和机器人手势与人类玩家互动。”“我们详细介绍了软件设计,对机器人的功效进行了定量评估,并为其可重复性提供了指导。”
张、德温特和他们的同事在一系列初步测试中评估了他们的机器人平台,评估了它在国际象棋上与人类竞争的能力。虽然他们还没有探索与机器人互动的用户的感知,但他们发现机器人可以有效地规划未来的棋步,并将棋子移动到棋盘上的所需位置。
该机器人的底层代码和用于训练其分类器的数据集都是开源的,可以在 GitHub 上访问。因此,该机器人很快就能在其他机构制造,以开展以人机交互为重点的进一步研究。
“未来,我们打算利用这一设置来研究人工智能机器人在互动过程中如何影响人们,”张、德温特和他们的同事写道。“这将涉及机器人通过情感表达和更自然的口头互动与人类交流。将 OpenChessRobot 的功能从国际象棋应用扩展到一般的身体辅助也是一个值得探索的有趣途径。”


