计算机科学家开发出受人眼启发的新型改进型相机
由马里兰大学计算机科学家领导的团队发明了一种摄像装置,可以改善机器人观察周围世界和做出反应的方式。他们的创新摄像系统受到人眼工作原理的启发,模仿眼睛微小的不自主运动,以保持长时间清晰稳定的视力。
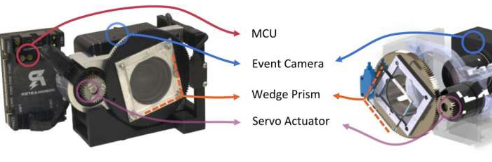
该团队对该相机(称为人工微扫视增强事件相机(AMI-EV))的原型设计和测试在《科学机器人》杂志上发表的一篇论文中进行了详细介绍。
“事件摄像机是一种相对较新的技术,比传统摄像机更善于追踪移动物体,但当涉及大量运动时,当今的事件摄像机很难捕捉到清晰、无模糊的图像,”该论文的第一作者、马里兰大学计算机科学博士生何波涛说道。
“这是一个大问题,因为机器人和许多其他技术(例如自动驾驶汽车)都依赖准确及时的图像来对不断变化的环境做出正确反应。因此,我们问自己:人类和动物如何确保他们的视线始终集中在移动的物体上?”
对于何教授的团队来说,答案是微扫视,即当人们试图集中视线时不由自主发生的微小而快速的眼球运动。通过这些微小而连续的运动,人眼可以长时间准确地聚焦于物体及其视觉纹理(例如颜色、深度和阴影)。
何立表示:“我们认为,就像我们的眼睛需要微小的运动来保持聚焦一样,相机可以使用类似的原理来捕捉清晰准确的图像,而不会因运动而产生模糊。”
该团队通过在AMI-EV内插入旋转棱镜来重定向镜头捕捉的光束,成功复制了微扫视。棱镜的连续旋转运动模拟了人眼中自然发生的运动,使相机能够像人一样稳定记录物体的纹理。然后,该团队开发了软件来补偿棱镜在AMI-EV内的移动,以巩固来自移动光线的稳定图像。
该研究的共同作者、马里兰大学计算机科学教授YiannisAloimonos认为该团队的发明是机器人视觉领域的一大进步。
“我们的眼睛拍摄周围的世界,这些照片被发送到大脑,大脑对图像进行分析。感知就是通过这个过程发生的,这就是我们理解世界的方式,”阿洛伊莫诺斯解释道,他也是马里兰大学高级计算机研究所(UMIACS)计算机视觉实验室的主任。“当你和机器人一起工作时,用相机代替眼睛,用计算机代替大脑。更好的相机意味着机器人有更好的感知和反应。”
研究人员还认为,他们的创新可能具有超越机器人和国防的重大意义。从事依赖精确图像捕捉和形状检测的行业的科学家一直在寻找改进相机的方法——而AMI-EV可能是他们面临的许多问题的关键解决方案。
“凭借其独特的功能,事件传感器和AMI-EV有望成为智能可穿戴设备领域的焦点,”该论文的资深作者、研究科学家CorneliaFermüller表示。“它们与传统相机相比具有明显的优势,例如在极端光照条件下的卓越性能、低延迟和低功耗。这些功能非常适合虚拟现实应用,例如,无缝体验和快速计算头部和身体运动是必需的。”
在早期测试中,AMI-EV能够在各种情况下准确捕捉和显示运动,包括人体脉搏检测和快速移动形状识别。研究人员还发现,AMI-EV可以以每秒数万帧的速度捕捉运动,优于大多数常见的商用相机,后者平均每秒捕捉30到1000帧。
这种更流畅、更逼真的运动描绘可能对创造更具沉浸感的增强现实体验、更好的安全监控以及改善天文学家在太空捕捉图像的方式等任何方面都至关重要。
“我们的新型摄像系统可以解决许多具体问题,比如帮助自动驾驶汽车辨别道路上哪些是人,哪些不是人,”阿洛伊莫诺斯说。“因此,它有许多应用,许多普通公众已经与之互动,比如自动驾驶系统甚至智能手机摄像头。我们相信,我们的新型摄像系统正在为未来更先进、更强大的系统铺平道路。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
在众多紧凑型性能车中,大众高尔夫GTI始终以其独特的驾驶乐趣和经典形象占据着重要地位。对于预算有限但又追求...浏览全文>>
-
2022款的大众蔚揽以其优雅的设计和出色的性能在市场上占据了一席之地。对于预算在20-30万元之间的消费者来说,...浏览全文>>
-
池州长安启源E07作为一款备受关注的新能源SUV,在市场上拥有较高的关注度。这款车型凭借其时尚的设计和丰富的...浏览全文>>
-
近年来,随着汽车市场的竞争愈发激烈,各大品牌纷纷推出优惠政策以吸引消费者。作为国内知名汽车品牌之一,蚌...浏览全文>>
-
菱势汽车的菱势电卡是一款新能源物流车,如果您想预约试驾这款车型,以下是可能的流程及注意事项:预约试驾流...浏览全文>>
-
奥迪e-tron GT是一款融合了豪华与科技的电动跑车,如果您对这款车型感兴趣并希望进行试驾体验,可以通过以下...浏览全文>>
-
试驾五菱扬光是一次非常有趣的体验。以下是从咨询到试驾的完整体验过程:咨询阶段1 信息获取:首先通过官方...浏览全文>>
-
在试驾丰田bZ3C时,享受4S店专业服务的关键在于提前做好准备,并充分利用4S店提供的各项资源。以下是一些具体...浏览全文>>
-
近年来,新能源汽车市场蓬勃发展,各大品牌纷纷推出全新车型以满足消费者需求。作为大众汽车旗下备受关注的新...浏览全文>>
-
作为一款备受关注的新能源车型,2022款亳州迈腾GTE在市场上的表现一直引人注目。近期,其最低落地价已降至18 ...浏览全文>>
- 蚌埠揽巡最新价格2024款走势,市场优惠力度持续加大
- 亳州迈腾GTE多少钱 2022款落地价走势,近一个月最低售价18.79万起,性价比凸显
- 安庆探影多少钱?价格解读
- 天津滨海高尔夫GTI最新价格2025款,各车型售价大公开,性价比爆棚
- 试驾奕泽IZOA,感受豪华与科技的完美融合
- 五菱E5试驾预约操作指南
- ARCFOX极狐极狐 阿尔法S6试驾有哪些途径
- 奔腾T55预约试驾有哪些途径
- 东风风度帕拉丁试驾,开启完美驾驭之旅
- 试驾腾势N7,一键搞定,开启豪华驾驶之旅
- 开沃D10多少钱?经销商报价及市场优惠情况
- 飞度新款价格2025款多少钱?如何挑选性价比高的车
- 东莞途锐 2025新款价格全解买车必看
- 试驾东风小康EC36 II的流程及注意事项
- 北京BJ30预约试驾预约流程
- 奥迪A6(进口)试驾预约,从咨询到试驾的完整体验
- 东风本田M-NV试驾全攻略
- 欧拉芭蕾猫落地价全解,买车必看的省钱秘籍
- 龙耀8L新车报价2022款,各配置车型售价全解析
- 沃尔沃S60新能源多少钱 2024款落地价实惠,配置丰富,不容错过