触觉反馈是虚拟现实和远程操作系统中真实性和深度参与度的基石。然而,现有的触觉设备在复制触觉属性的保真度方面遇到了困难,因为其自由度和表达范围受到限制。这一限制引发了对创新解决方案的迫切追求,这些解决方案可以增强触觉系统的响应能力和适应性。
在一项合作中,伊斯兰科技大学和斯利那加国家技术学院公布了触觉领域的一项变革性发展。他们的研究于 2024 年 6 月 5 日发表在《国际机械系统动力学杂志》上,提出了一种用于多自由度 (multi-DOF) 触觉界面的双速率采样方法,标志着在增强触觉性能方面取得了显著的飞跃。
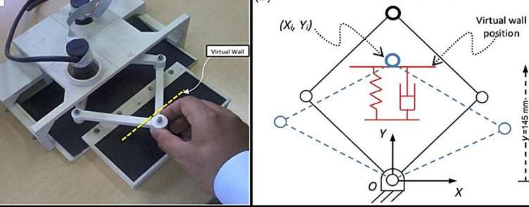
这项研究的核心创新在于双速率采样方案的应用,该方案在现场可编程门阵列 (FPGA) 上精心实现。该策略通过将虚拟环境中的刚度和阻尼分量解耦为并行反馈回路,并以两个不同的采样率进行渲染,有效地拓宽了 Z 宽度(可以稳定渲染的虚拟阻抗频谱)。
基于 FPGA 的实现尤其具有挑战性,它涉及用于速度估计和碰撞检测的复杂数字逻辑,但已成功实现。这一进步不仅有望在虚拟环境中实现更稳定的交互,而且还为开发能够呈现更广泛虚拟阻抗的触觉界面铺平了道路,这对于医疗培训、远程手术和高级模拟环境中的应用至关重要。
首席研究员 Majid Koul 博士表示:“我们的双速率采样方案打破了触觉界面的传统限制,提供了更宽的虚拟阻抗动态范围,同时在更高的采样率下保持稳定性。这项创新将重新定义虚拟和远程环境中用户交互的质量。”
这项研究意义深远,有望重塑触觉技术发挥关键作用的行业格局。从为医疗专业人员提供与真实组织触觉特性极为相似的模拟,到使远程操作员能够以前所未有的精度执行精细的远程任务,这种双速率采样方案有望提供更高的真实感和可靠性。
它与虚拟现实和工程设计的结合有望掀起新一波交互式体验和复杂的 3D 模型操作浪潮,推动数字应用进入无缝且复杂的触觉交互的未来。


















